Concept
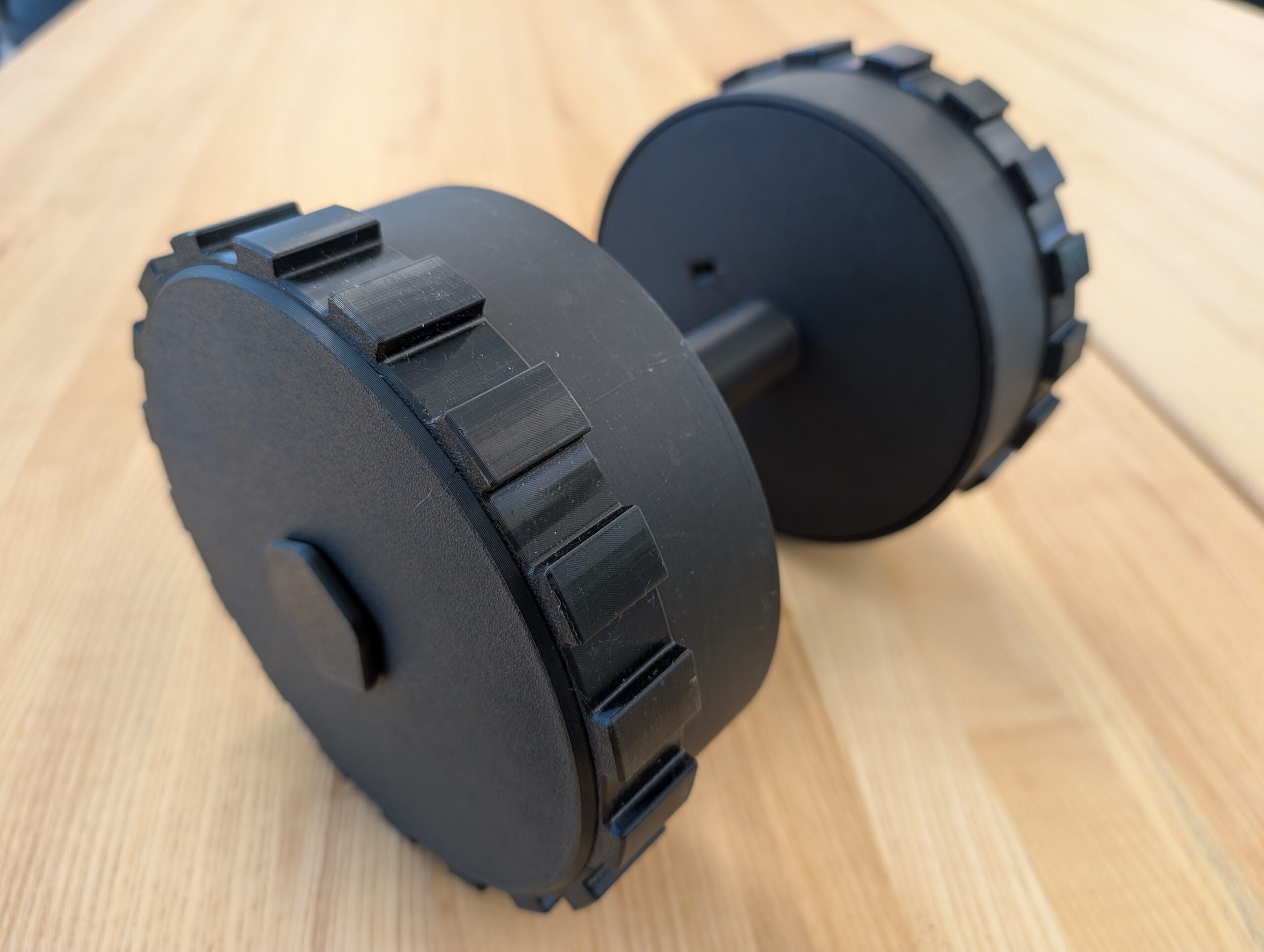
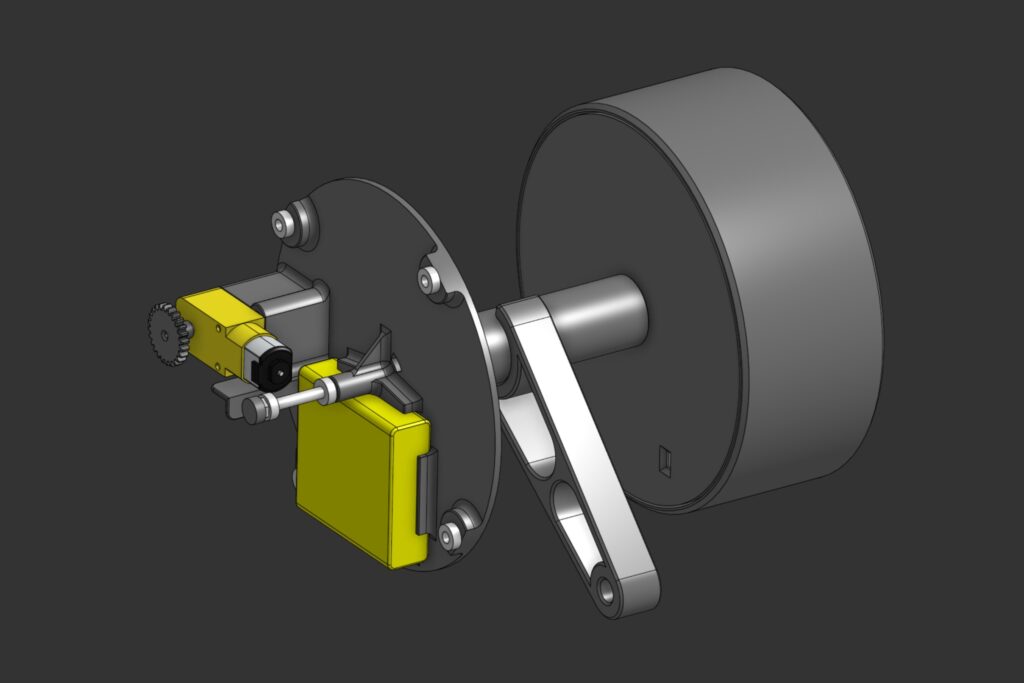
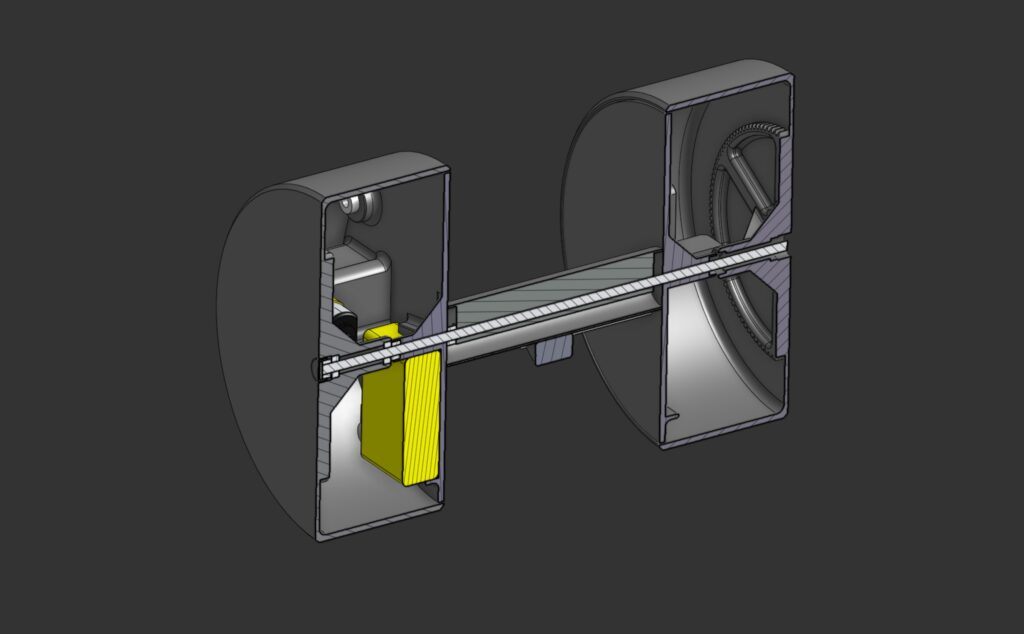
I wanted to make a ball robot that wasn’t technically a ball robot and hide all electrical and mechanical components inside a minimal design. The idea was to turn the hemispheres of a ball robot into cylindrical wheels that would be separated by a wire conduit, giving it a dumbbell shape. Each wheel contains a gearbox DC motor, battery pack, Romeo BLE mini V2 (or a 3D printed dummy Romeo to maintain an even distribution of weight), and drive gears. All of the components are concentrated on the lower half of each hub to act as a counterweight for the motors to push off of.
Design
Multiple design iterations were necessary to solve problems such as hub and wheel strength and rigidity, wheel drag, and component location (Romeo USB and power switch access). While it was initially believed that the rover would be able to climb ramps with a staggered wheel motion, after testing it was determined that a “kickstand” would be necessary to allow it to overcome more obstacles. A kickstand was 3D printed from PLA and clamped onto the wire conduit shaft with set screws to help resist rotation. This addition succeeded in allowing the rover to drive over steeper ramps and a wide range of obstacles.
Fabrication
Everything is built around a 250 mm M5 all-thread rod that serves as the main axle and backbone of the rover. Hex lock nuts firmly hold the left and right hubs and central wire conduit in place. 11 mm bearings allow each wheel to spin freely around the main axle and are also evenly spaced around the outside of each hub to provide additional wheel support. The wheels, hubs, and center conduit are all 3D printed using matte black PLA. The wheel treads are 3D printed with black TPU. The motors, outer wheel bearings, Romeo, and dummy Romeo are screwed into heatset inserts embedded in the PLA with M3 and M5 screws.

Reflection
Overall I’m happy with the final rover. Despite some limitations that stem from having only two wheels, this design makes for some fun and interesting behaviors. For example, if a change in direction is timed right the kickstand can be flipped back and forth and used as a tool to dig the rover out from popcorn. Thickening the components for strength meant the rover is pretty heavy and it can have a hard time powering over some obstacles. The high gear ratio does provide a good amount of torque, but it also makes the rover considerably slower than other designs.